
זהו חלק השלישי מתוך שלושה מאמרים בהם מאור אלימלך יעזור לכם לעשות סדר במושגים השונים ולבאר כיצד הם קשורים
אחד לרעהו. אם הפסדת, הנה קישורים לחלק הראשון והשני
התהליך של קליטת הצבע ופיענוחו שונה במעט בין שתי סוגי מצלמות.
מצלמה בעלת שלושה חיישנים – משתמשת במנסרה המפצלת את האור לשלושה צבעים – אדום, ירוק וכחול שכל אחד מהם נקלט בחיישן נפרד. המידע על הצבע מתקבל בחיישן בגווני אפור ולאחר מכן האינפורמציה עוברת המרה לאחד מצבעי היסוד אותו החיישן קלט. שימוש במצלמה כזו אידיאלי בכל הקשור לאיכות הצבע ועומקו.
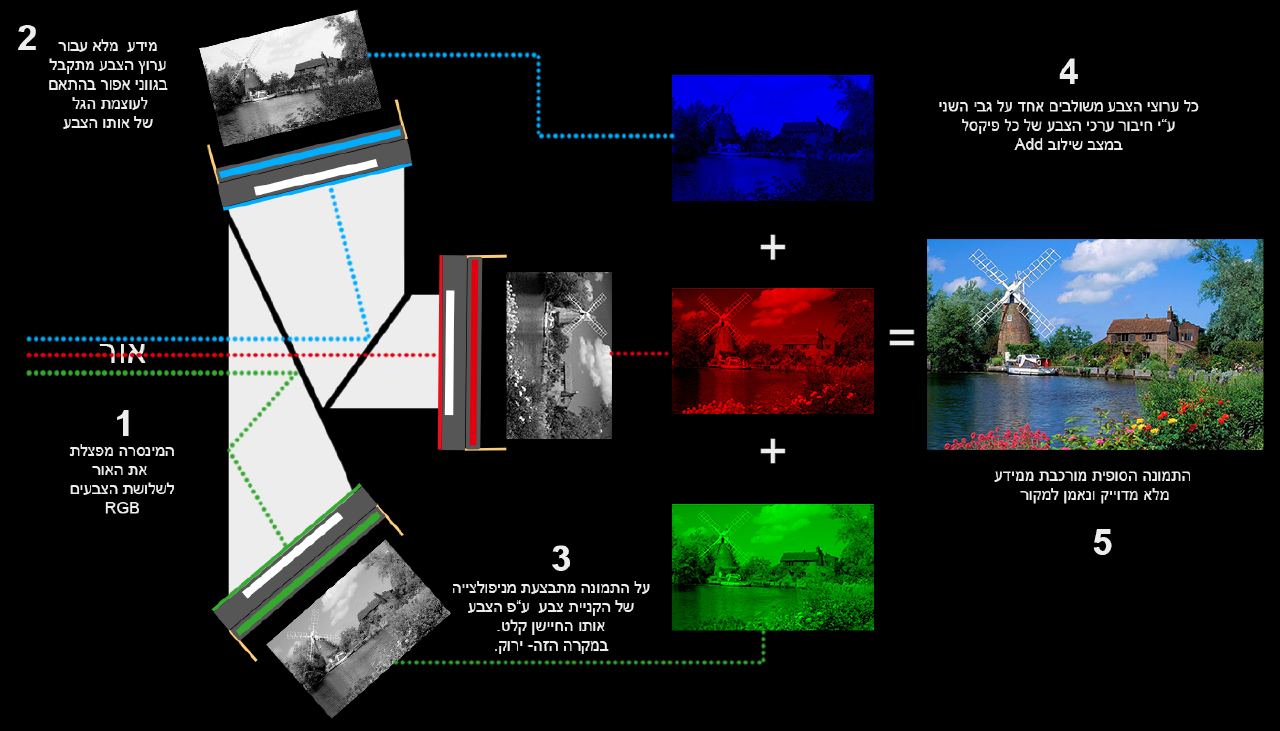
מסנן באייר, כמות הפיקסלים הירוקים גדולה פי שניים מהאדומים ומהירוקים משום שהעין רגישה יותר לצבע הירוק.
מצלמה בעלת חיישן בודד – קרני האור נופלים על חיישן בודד. אך ישנה בעיה – חיישן בודד שרגיש לאור מסוגל לייצר תמונת שחור לבן כפי שראינו במצלמת שלושה חיישנים. אם כן איך נוכל לייצר אינפורמציה של שלושת הצבעים בעזרת חיישן אחד בלבד?
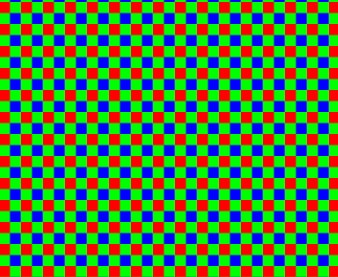
לעזרתנו נחלץ ברייס באייר, באייר פיתח בשנות השבעים, עבור חברת קודאק, מטריצה שיושבת על החיישן ומהווה מסנן אור, כך שכל פיקסל בחיישן מקבל רק אחד משלושת הצבעים RGB.
באייר הניח כי ניתן להשלים מידע בצורה משוערת ע"פ מידע חלקי אודות הצבע בתמונה. לכן ניתן לפזר את מסנני הצבע בין הפיקסלים בחיישן ולאחר מכן להפעיל אלגוריתם שיבצע אינטרפולציה וישלים את המידע החסר ע"פ המידע החלקי הקיים. ניתן להבחין כי כמות הפילטרים הירוקים כפולה מזו של האדום והכחול זאת משום שהעין יותר רגישה לצבע הירוק (זו הסיבה לשימוש במסך ירוק בביצוע מפתוח צבעים (כרומה-קי) בכדי שהצריבה תהיה יותר מדויקת משום שבערוץ זה קיים יותר מידע).

התמונה כפי שהיא נראית מבעד למסנן באייר והתמונה לאחר העיבוד
שימוש במטריצת באייר נעשה כיום בכל המצלמות הביתיות, הבלתי מקצועיות ומצלמות ה-DSLR וזאת משום ששימוש בחיישן בודד מוזיל מאוד את עלויות הייצור. חסרונה כפי שיכולתם לנחש הוא בדיוק הצבע ואיכותו "הודות" לאינטרפולציה של באייר.

תהליך הצבע במצלמת חיישן בודד
פרה אדומה, ירוקה וכחולה
כאן תרשו לי לשחוט קצת מהפרה הקדושה הזו של ההבדל באיכות הצבע בין שלושה חיישנים לחיישן בודד. בשנים האחרונות אנו עדים ליציאתן של מצלמות קצה, אשר נמצאות בשימוש נרחב בתעשייה והן בעלות חיישן בודד. למרות זאת מצלמות אלו מייצרות דיוק צבע שלא משאיר טעם להשוואה כי אין הבדל כלל.
בין המצלמות שמפיקות צבע בדיוק גבוה בחיישן בודד ניתן למצוא את השמות הכי חמים: Black Magic Cinema Camera,Red One, Arri Alexa, Canon C500, C300 ועוד. אם כן היכן בדיוק ההבדל? מסתבר שהכל עניין של זמינות משאבים וקהל צרכנים.
הפקת צבע ברמה גבוהה בשימוש בחיישן בודד כרוכה בתהליך עיבוד תובעני, כך שלא ניתן לבצע Debayer (מלשון המרה למטריצת באייר) ברמה גבוהה בזמן אמת של הצילום. מצלמות קצה, שמיועדות לסרטי קולנוע או פרסומות, לא מבצעות את התהליך בזמן הצילום, אלא שומרות את כל האינפורמציה בצורה גולמית (RAW) ומאפשרות Debayer רק בתהליך הפוסט, שם נמצאים מלוא המשאבים והזמן לביצוע תהליכי פיתוח אלו.
לעומתן, המצלמות הפונות לתעשיית הביניים ובמיוחד מצלמות ברודקאסט לשידור לא מאפשרות לשמור חומר גלם בפורמט גולמי, עקב המשקל העצום ולכן התהליך מתבצע בזמן אמת בצילום.
עם זאת בשנים האחרונות הושקו מספר מצלמות שפונות לשוק המקצועי כגון: Sony FS700 או Canon C300, ואלו בעלות חיישן DSLR בודד. אף על פי כן מצלמות אלו מציגות צבעים שלא מביישים את הסטנדרט בתחום (4:2:2) וזאת למרות שעל פי רב הן מבצעות תהליך Debayer בזמן אמת בעת הצילום. הסיבה להצלחת מצלמות אלו היא שימוש בחיישן 4K הגדול פי ארבע מרזולוציית HD. בהתבסס על כך שהפריים הסופי הוא HD ניתן לייצר תמונה מלאה לכל אחד מערוצי הצבע ללא צורך באינטרפולציה.
לאחר השלמת המידע בכל הערוצים וחיבורם לכדי תמונה אחת מתבצע תיקון גאמא כפי שהסברנו ולאחריו דחיסת הצבע, קידוד מידע ואחסונו.
דחיסת צבע
דחיסת צבע הוא נושא מאוד מרכזי. כיום כשמדברים על איכות הצבע בוידאו הכל מתחיל ונגמר בשאלה: מהי דחיסת הצבע שעבר הוידאו? אני אישית חושב שזו גישה שגויה לבחינה של איכות צבע, כיוון שכפי שראינו לעיל ישנם הרבה מרכיבים שמשפיעים על המראה הסופי של הפריים.
למה לדחוס בכלל?
לפני שנדון על הדחיסה בפועל אנו זקוקים להבין למה בכלל צריך לדחוס את הצבע?
דחיסת צבע היא אחד ממשורי הדחיסה שעוברים התמונה והוידאו. כל מאמצי הדחיסה שמבצעים על וידאו מטרתם אחת ויחידה – לייצר וידאו שקל יותר לנהל אותו, לצפות בו ולערוך אותו. בכדי להבין את הבעייתיות בוידאו שאינו דחוס נעשה חישוב כדי למצוא מהו משקלו הסגולי של וידאו שאינו דחוס.
נבצע חישוב על פריים באבחנה גבוהה ברזולוציית 1920X1080 בעומק צבע של 24bit ובקצב פריימים של 25 פריים לשנייה.
ע"פ נוסחת השטח כל פריים מכיל 2,073,600 פיקסלים כאשר כל פיקסל מיוצג ע"י 24bit לכל ערוץ צבע לכן החישוב הכולל יהיה:
24*3*2,073,600*25= 466.56MB
466.65 מגה בייט לשנייה אחת! כלומר, סרט באורך שעה לדוגמה ישקול 1.67TB. זהו מצב בלתי אפשרי, אין כונן איחסון סטנדרטי שקרוב ליכולות הדרושות בכדי לנגן קובץ עם קצב נתונים כה גבוה. המשמעות היא שלא ניתן לעשות עם הקובץ כלום, לא לצפות בו, לא לערוך אותו ובטח לא להעלות אותו לרשת האינטרנט (מבלי למות קודם מזקנה).
לשם כך נוצרו המקודדים שמטרתם להפחית את משקל הקובץ כמה שיותר תוך כדי ניסיון מקסימלי להישאר נאמנים למקור.
מהי דחיסת צבע?
דחיסת צבע היא כל פעולה שנעשית על הצבע בתמונה ומטרתה להוריד את משקל הקובץ הסופי. ישנם שני פרמטרים מרכזיים שניתן לבצע בהם דחיסה – עומק הצבע ורזולוציית ערוצי הצבע.
דחיסת עומק צבע
הורדת עומק הצבע. לדוגמה, וידאו שהוקלט ב-12bit והומר ל-8bit עבר דחיסת עומק צבע. כפי שראינו, קפיצה מעלה בעומקי הצבע השונים משפיעה באופן דרמטי על נפח הקובץ. לעומת זאת מרמה של 8bit ומעלה המחיר שעלינו לשלם במשקל הקובץ בהרבה מקרים אינו מצדיק את התמורה שאנו מקבלים בדמות איכות התמונה. לכן כיום 8bit הוא סטנדרט בוידאו לצפייה ופחות מומלץ לעריכת וידאו או אפקטים ויזואלים, למרות שהוא נפוץ מאוד גם בתחום הזה.
דחיסת רזולוציית ערוצי הצבע
הקטנת גודל הפריים של ערוצי הצבע YUV. משום שהעין האנושית רגישה לצבע פחות מאשר לבהירות אינפורמציית הצבע הופכת אוטומטית למטרה נוחה לדחיסה אובדנית. הבעיה היא שהאינפורמציה שמגיעה מהחיישן RGB אינה מפרידה בין צבע לבהירות ולא ניתן לדחוס את הצבע מבלי לפגוע בבהירות לכן התמונה עוברת המרה מתמטית למודולת צבעים YUV שמבצעת הפרדה כזו.

לאחר שיש בידנו פריים שמיוצג ב-YUV ניתן להקטין את רזולוציית הערוצים U ו-V בכדי להקטין את משקל הקובץ. תהליך זה נקרא Chroma Subsampling – דגימת צבע משנית. בתהליך זה נדגמת חצי רבע או שמינית מרזולוציית הפריים המקורי של ערוץ צבע בודד. במילים פשוטות מתבצע כאן Down Scale בצורה הכי פרימטיבית שיש.
מה זה כל המספרים האלה?
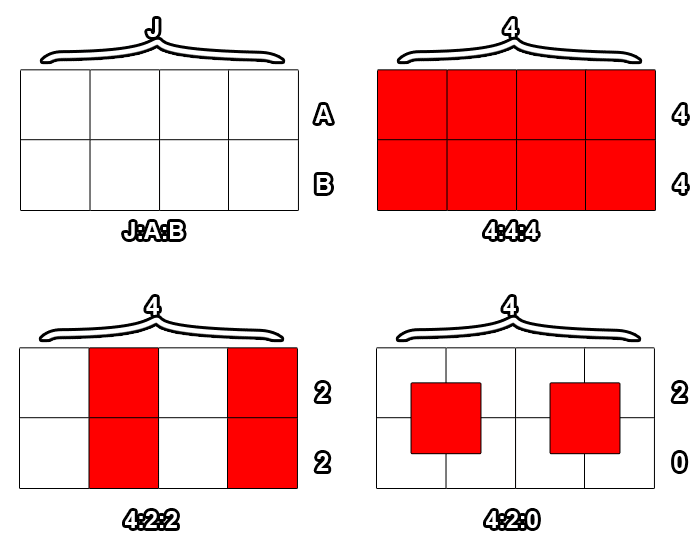
מקובל לציין את רמת דחיסת YUV שעבר הקובץ בצורה [J:A:B] כאשר:
J: רוחב אזור הדגימה המינימלי בפיקסלים – כמעט תמיד הרוחב יהיה 4 פיקסלים.
A: מספר המציין את מספר הפיקסלים שנדגמו מתוך אזור הדגימה בשורה העליונה.
B: מספר המציין את מספר הפיקסלים שנדגמו מתוך אזור הדגימה בשורה התחתונה.
דוגמאות לדחיסות נפוצות:
4:4:4 – דגימה מלאה דהיינו לא התבצעה דחיסה בכלל. מצלמות מעטות לא דוחסות צבע והן בשימוש תעשיית הקצה של הסרטים והפרסומות.
4:2:2 – רק חצי מאינפורמציית הצבע נדגמה, פשרה מעולה למטרות פוסט מקצועי. נפוץ מאוד בתעשייה מקצועית והחצי מקצועית.
4:2:0 – רק רבע מאנפורמציית הפריים נדגמת. מתאים להפצה בפורמט DVD או H.264
תבנית לקוח
בתעשיית המצלמות נהוג לארוז חבילה של תכונות צבע כך שהן יתאימו לקהל לקוחות מסויים למרות שאין שום קשר טכני בין התכונות. כך למשל תוכלו לראות מצלמה שמציעה דחיסת צבע של 4:2:2 עם עומק צבע של 10bit כל זאת למרות שאין קשר טכני בין האספקטים.
כמו כן, קשה מאד למצוא מצלמות שמשתמשות בחיישן בודד (שמבצע debayer בזמן אמת) עם עומק צבע של יותר מ-8bit. למרות שמדובר כאן על שני מימדים שונים של איכות צבע. בקיצור, בכל מה שקשור למצלמות דברים טובים באים ביחד (עם הרבה כסף…) וכל זה מדוע? משום שקהל לקוחות המקצועי מחפש איכות צבע גבוהה, ובכדי להשיג איכות צבע ברמה מספקת זקוקים לרמה גבוהה של צבע בכמה אספקטים.
סיכום
בפרק זה למדנו על יתרונות השיטה הדיגיטלית ועל חסרונותיה מול השיטה האנלוגית. הבנו מהו עומק מידע ומהם הסטנדרטים לעומק מידע בעולם מדיית החוזי ודיברנו על מרחב דינמי בתמונה, מה הקשר שלו לעומק המידע וכיצד ניתן להתגבר על מגבלותיו. לסיום קינחנו עם אדון באייר וההבדל בתהליכי הצבע בין חיישן אחד לבין שלושה. משום שלערן יש כבר מאמר מקיף על נושא התנועה והשדות בווידאו בפרק הבא נדבר על המרכיב האחרון והוא דחיסת וידאו.
במצלמה של הווצאפ שלי יש אפקט ירוק וגם באינסטגרם ואני רוצה לדעת איך אני מורידה את זה.
אם זה בכל התמונות כניראה שיש תקלה במצלמה
סחטן על הטרילוגיה, מאור! מעשיר ביותר, למרות שכדי לזכור את כל מה שכתוב כאן צריך דוחס שלא מאבד נתונים:) בקיצור, מה אתה עושה כאן, עוף לסיגרף:)